The Autonomous Driving Forum of the 2024 International Industry-Academia-Research-Application Cooperation Conference on New Energy and Intelligent Connected Vehicles was successfully held on November 9 at the Feicui Lake campus of Hefei University of Technology. The seminar, jointly organized by Hefei University of Technology, JAC Group, and the Anhui Artificial Intelligence Society, was themed "Empowering New Energy with Industry-Academia-Research-Application Cooperation, Creating a Future through Multilateral Collaboration." The event focused on key issues such as basic research, practical applications, autonomous driving, intelligent connectivity systems and applications, innovation in new energy technologies, smart transportation, intelligent equipment, and frontier technologies in intelligent system control. The Autonomous Driving Forum was hosted by the School of Computer Science and Information Engineering at Hefei University of Technology.
The forum invited 11 experts to give keynote speeches, including Professor Gao Bingzhao from Tongji University, Professor Zhang Guofeng from Zhejiang University, Senior Scientist Lin Yan from iFlytek, Professor Abderrahmane Lakas from the University of the United Arab Emirates, Associate Professor Konstantin A. Grebenyuk from Saratov State University in Russia, Senior Lecturer Fenghui Ren from the University of Wollongong in Australia, Professor Ma Chao from Shanghai Jiao Tong University, Researcher Zhang Li from Fudan University, Researcher Ma Yuexin from Shanghai University of Science and Technology, Professor Guo Yulan from Sun Yat-sen University, and CTO and Co-founder Yuan Sheng from Zhichi AI. Professors Jia Wei, Zhong Zhun, Wang Yang, and Tang Yiming from the School of Computer Science and Information Engineering in Hefei University of Technology served as forum moderators.
Hefei University of Technology Vice President, Professor Wang Meng, delivered an enthusiastic welcome speech, extending a warm welcome to all the experts attending the forum. He expressed his hope that the convening of this forum would further promote the university's industry-academia-research cooperation in the field of autonomous driving.

Professor Gao Bingzhao's report was titled "Embodied Realization of Large Models for Autonomous Driving." Starting from the practical challenges faced by autonomous driving, he meticulously outlined the technological evolution of autonomous driving algorithm development. He provided a comprehensive summary of the cutting-edge progress in self-supervised learning and clearly mapped out a feasible technical route for the vertical application of AI large models based on self-supervised learning in autonomous driving scenarios. This opened a deep exploration journey combining academic research and technical innovation.
Professor Zhang Guofeng's report was titled "Edge-Cloud Collaborative Visual Localization and 3D Reconstruction," focusing on classical and critical issues in the field of computer vision. In his presentation, he detailed the in-depth research efforts his team has undertaken in recent years to tackle these key challenges. He also introduced the edge-cloud collaborative visual localization and 3D reconstruction system they developed, showcasing its functionality and application effectiveness through real-world case studies. This provided valuable insights and innovative ideas for breakthroughs in related technologies.

Lin Yin's report was titled "The Application Status of Multimodal Perception Interaction in Intelligent Cockpits and iFLYTEK's Related Case Introduction." Focusing on the comprehensive application of multimodal perception interaction in intelligent cockpits, the presentation delved into several aspects: the background and root causes of the problem, key milestones in the development process, an in-depth analysis of the current research status, and a forward-looking outlook on future trends. Additionally, the report introduced iFLYTEK's independent research and development progress in areas such as multimodal speech recognition, gesture and gaze interaction, and emotional health monitoring technologies.

Professor Abderrahmane Lakas' report was titled "Harnessing LLMs for Autonomous Mobility: Opportunities and Challenges." This report brought an international perspective and cutting-edge reflections to the field of autonomous driving. It examined the development opportunities and challenges of autonomous driving technology from various cultural and academic backgrounds, further enriching the academic depth and diversity of the forum.

Associate Professor Konstantin A. Grebenyuk's report was titled "Optical Solution for the Camera Convergence Problem." The report focused primarily on optical solutions to address the camera convergence problem, providing insights into innovative approaches in the field of optical technology to improve camera system performance and accuracy.

Senior Lecturer Fenghui Ren's report was titled "Agent-Based Modelling and Simulation of Smart Systems." The report elaborated on the concepts and applications of agent-based modeling and simulation in smart systems, exploring how these methods can be used to model complex behaviors and interactions in intelligent environments, and offering insights into the development and optimization of smart systems through such simulations.
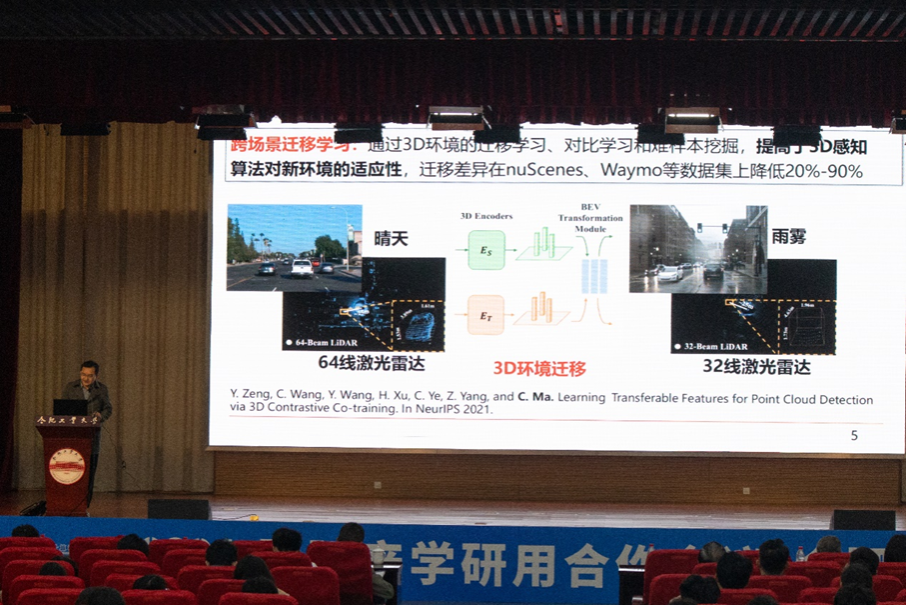
Professor Ma Chao's report was titled "Intelligent Driving Scene Understanding and Reconstruction." The presentation focused on advancements in multimodal perception and generative tasks, including how generative models and pre-trained models can enhance the ability to perceive visual scenes in intelligent driving contexts. It explored the integration of these models to improve the accuracy and efficiency of scene understanding and reconstruction, contributing to the development of more robust autonomous driving systems.
Researcher Zhang Li's report was titled "Research on the Autonomous Driving Closed-Loop Simulation System Based on Generative Physics Intelligence." The presentation addressed the limitations of neural radiance fields in autonomous driving closed-loop simulation scenarios and proposed a new system. Zhang discussed the advantages of tetrahedral mesh technology and four-dimensional Gaussian representation in static and dynamic scene applications. He emphasized how these technologies enhance the efficiency and accuracy of autonomous driving reconstruction, offering significant improvements in simulation accuracy and system performance for autonomous vehicles.

Researcher Ma Yuexin's report was titled "Reliable Autonomous Driving Perception and Decision Making." The presentation explored the robustness and safety issues of autonomous driving in the era of general artificial intelligence. Key topics included enhancing the general intelligence of intelligent driving systems, addressing generalization to new domains, and enabling intelligent driving models to possess legal knowledge and excellent driving skills. Ma emphasized the importance of creating systems that are not only technically capable but also safe and adaptable to diverse real-world scenarios, ensuring that autonomous vehicles meet both regulatory standards and real-world driving challenges.

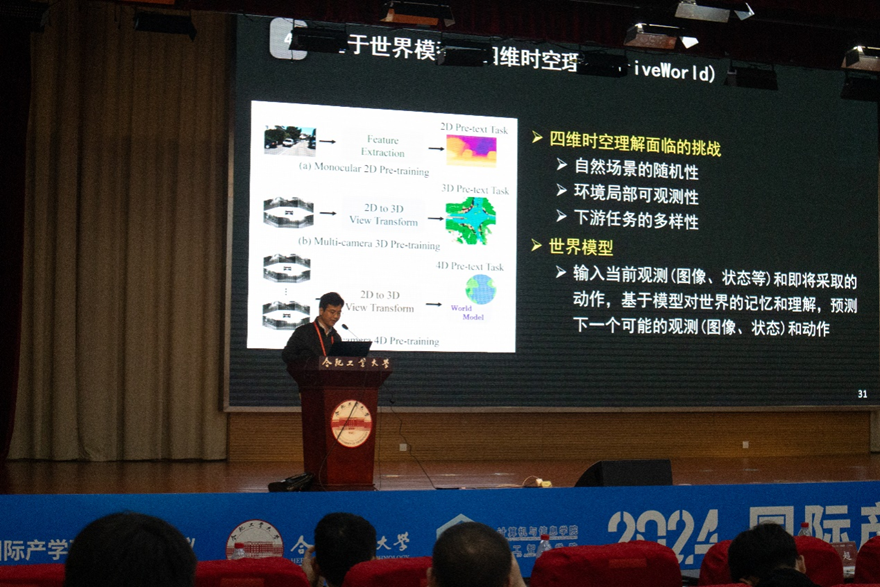
Professor Guo Yulan's report was titled "3D Scene Understanding for Intelligent Driving." In the presentation, Guo shared the team's achievements in efficiently parsing large-scale 3D point clouds for semantic understanding and in four-dimensional temporal prediction based on world models. These advancements are crucial for enhancing the accuracy and efficiency of 3D scene recognition in autonomous driving, helping to create more effective systems for understanding complex environments and predicting future scenarios in real time.
CTO Yuan Sheng's report was titled "Multimodal Intelligent Driving Large Models Empowering the Deployment of Autonomous Driving." In his presentation, Yuan introduced the development history of Zhongke Zhichi and its autonomous driving technology roadmap. He also discussed the architecture of multimodal large models and explored key technological areas such as model construction, cloud-edge-end fusion training, and model compression. His insights highlighted how these advancements are crucial in improving the efficiency, scalability, and deployment of autonomous driving systems, helping to bridge the gap between research and real-world applications.

After the expert reports concluded, Professor Jia Wei, the forum organizer, delivered a summary. He expressed sincere gratitude to the experts who presented, the members of the forum's organizing committee, as well as the guests, faculty, and students who attended. Professor Jia also conveyed his hopes for continuing the Autonomous Driving Forum in the next International Industry-Academia-Research Cooperation Conference on New Energy and Intelligent Connected Vehicles. This annual event aims to further promote collaboration and innovation in the autonomous driving field.
 TOP
TOP
